









Product Information »
WEB Catalog
»
Vacuum Equipment (Vacuum Generators/Vacuum Suction Cups/Other)
»
Gripper for Collaborative Robots
WEB Catalog
Product List
- Air Management System
-
Directional Control Valves
- Pilot Operated 4/5 Port Solenoid Valves
- Pilot Operated 3 Port Solenoid Valves
- Direct Operated 3/4/5 Port Solenoid Valves
- Reduced-wiring Fieldbus System (Serial Transmission System)
- Air Operated Valves
- Mechanical Valves/Transmitters
- Finger Valve/Hand Valves/Residual Relief 3 Port Valve
- Blow Guns
- Power Valves
- ISO Valves
- Explosion-Proof Valves
-
Air Cylinders
- Standard Air Cylinders (Round Type)
- Standard Air Cylinders (Square Cover)
- Compact Air Cylinders
- Environment Resistant Cylinders
- Floating Joints/Rod End
- Air-hydro Units
- Mechanically Jointed Rodless Cylinders
- Magnetically Coupled Rodless Cylinders
- Table Cylinders
- Guide Cylinders
- Dual Rod Cylinders
- Lock Cylinders/Cylinder with An End Lock
- Fine Lock Cylinders
- Specialty Cylinders
- Clamp Cylinders
- Pin Shift Cylinder
- Stopper Cylinders
- Stroke Reading Cylinders
- Valve Mounted Air Cylinders
- ISO Cylinders
- Shock Absorbers
- Auto Switches
- Actuator Position Sensor
- Rotary Actuators/Air Grippers
- Electric Actuators/Cylinders
- Vacuum Equipment (Vacuum Generators/Vacuum Suction Cups/Other)
- Air Preparation Equipment
- Modular F.R.L./Pressure Control Equipment
- Lubrication Equipment
- Fittings and Tubing
- Flow Control Equipment
- Silencers/Exhaust Cleaners/Blow Guns/Pressure Gauges
- Switches/Sensors/Controller
- Static Neutralization Equipment
-
Industrial Device Communication Equipment/Wireless System
- Wireless System: PROFINET Compatible Products
- Wireless System: EtherNet/IP Compatible Products
- Wireless System: IO-Link Compatible Products
- Wireless System: CC-Link Compatible
- Industrial Device Communication Equipment: PROFINET Compatible Products
- Industrial Device Communication Equipment: EtherNet/IP Compatible Products
- Industrial Device Communication Equipment: EtherCAT Compatible Products
- Industrial Device Communication Equipment: Modbus TCP Compatible Products
- Industrial Device Communication Equipment: ETHERNET POWERLINK Compatible Products
- Industrial Device Communication Equipment: CC-Link IE Field Compatible Products
- Industrial Device Communication Equipment: SSCNET III Compatible Products
- Industrial Device Communication Equipment: MECHATROLINK-Ⅲ Compatible Products
- Industrial Device Communication Equipment: PROFIsafe Compatible Products
- Industrial Device Communication Equipment: IO-Link Compatible Products
- Industrial Device Communication Equipment: PROFIBUS Compatible Products
- Industrial Device Communication Equipment: DeviceNet Compatible Products
- Industrial Device Communication Equipment: CC-Link Compatible Products
- Industrial Device Communication Equipment: AS-interface Compatible Products
- Industrial Device Communication Equipment: CANopen Compatible Products
- Industrial Device Communication Equipment: CompoNet Compatible Products
- Industrial Device Communication Equipment: Interbus Compatible Products
- Industrial Device Communication Equipment: MECHATROLINK-Ⅱ Compatible Products
- Other: RS232C Compatible Products
- Other: RS485 Compatible Products
- Process Valves
- Chemical Liquid Valves/Fittings & Needle Valves/Tubing
- Process Pumps(Diaphragm Pumps)
-
Temperature Control Equipment
- Thermo-Chillers (Circulating Fluid Temperature Controllers) Standard Type/Basic Type
- Thermo-Chillers (Circulating Fluid Temperature Controllers) Inverter Type
- Thermo-Chillers (Circulating Fluid Temperature Controllers) Dual Channel Thermo chiller for Lasers
- Thermo-Chillers (Circulating Fluid Temperature Controllers) Rack Mount Type
- Thermo-Chillers (Circulating Fluid Temperature Controllers) High performance/Type & Inverter Type
- Thermo-Chillers (Circulating Fluid Temperature Controllers)
- Thermo-cons/Thermoelectric Baths (Peltier-Type Temperature Control Equipment)
- Air Temperature Controllers
- Process Gas Equipment
- High Vacuum Equipment
- Industrial Filters/Sintered Metal Elements
- Pneumatic Instrumentation Equipment
- Hydraulic Equipment
Theme
-
Clean Series/Low-Particle Generation
- Directional Control Valves
- Air Cylinders
- Rotary Actuators
- Air Grippers
- Air Dryers
- Compressed Air Cleaning Filter Series
- Clean Gas Filters/Air Filters
- Exhaust Cleaner for Clean Room/Clean Exhaust Filter
- Modular F.R./Pressure Control Equipment
- Fittings
- Tubing
- Flow Control Equipment
- Switches/Sensors
- Flow Switch
- Electric Actuators
- Fluoropolymer Equipment/PVC Equipment
-
Series Compatible with Secondary Batteries Series 25A-
- Directional Control Valves
- Actuators
- Related Products
- Rotary Actuators/Air Grippers
- Vacuum Equipment
- Air Preparation Equipment/Clean Air Filters
- ModularF.R.L./Pressure Control Equipment
- Flow Control Equipment/Fittings
- Tubings
- Detection Switches/Auto Switches
- Process Valves
- Process Gas Equipment
- Electric Actuators
- Copper, Fluorine-free Equipment Series 20-
- ISO Products
- Arc Welding Process Equipment
- IO-Link Devices
- List of ATEX Compliant Products
Gripper for Collaborative Robots
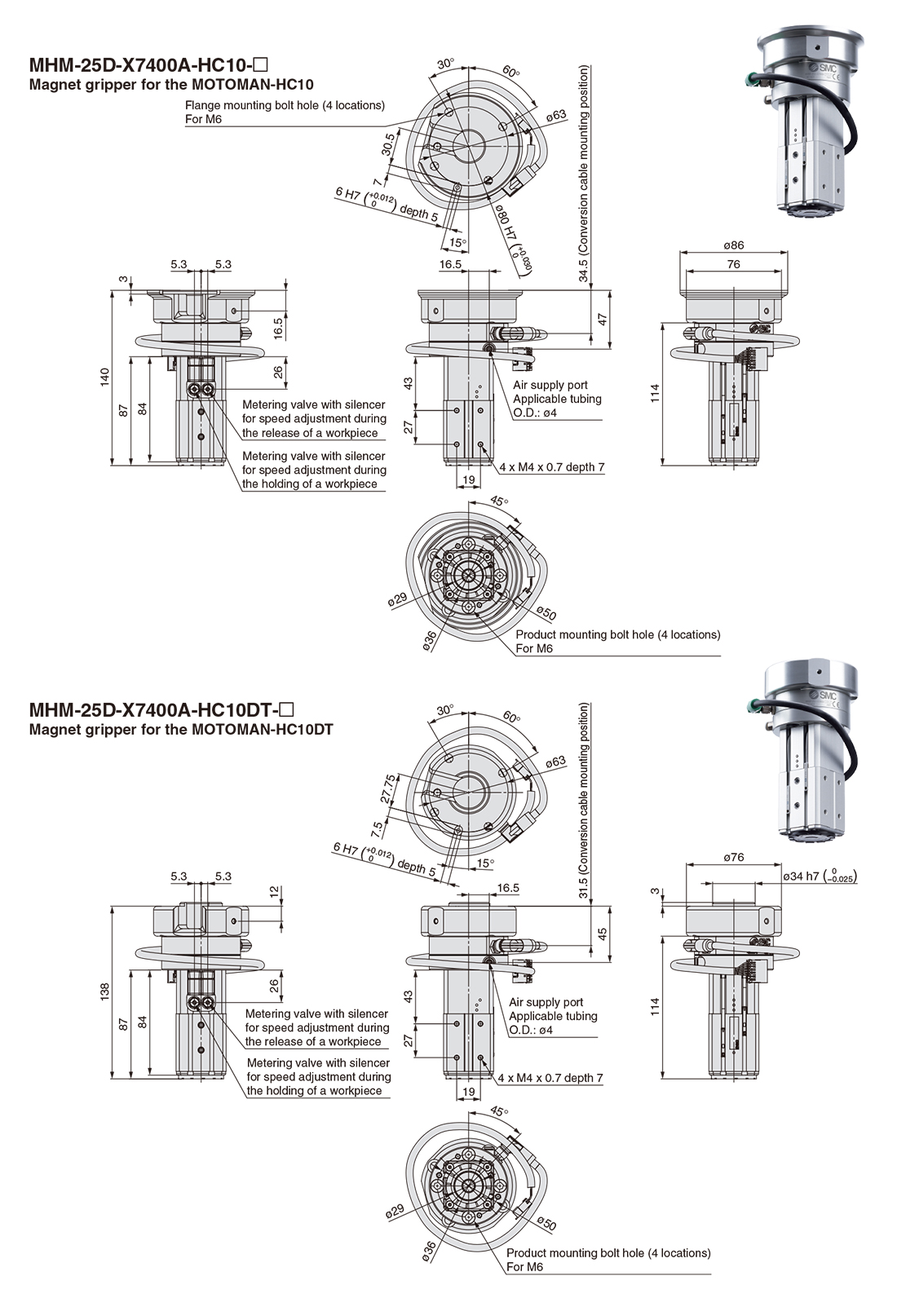
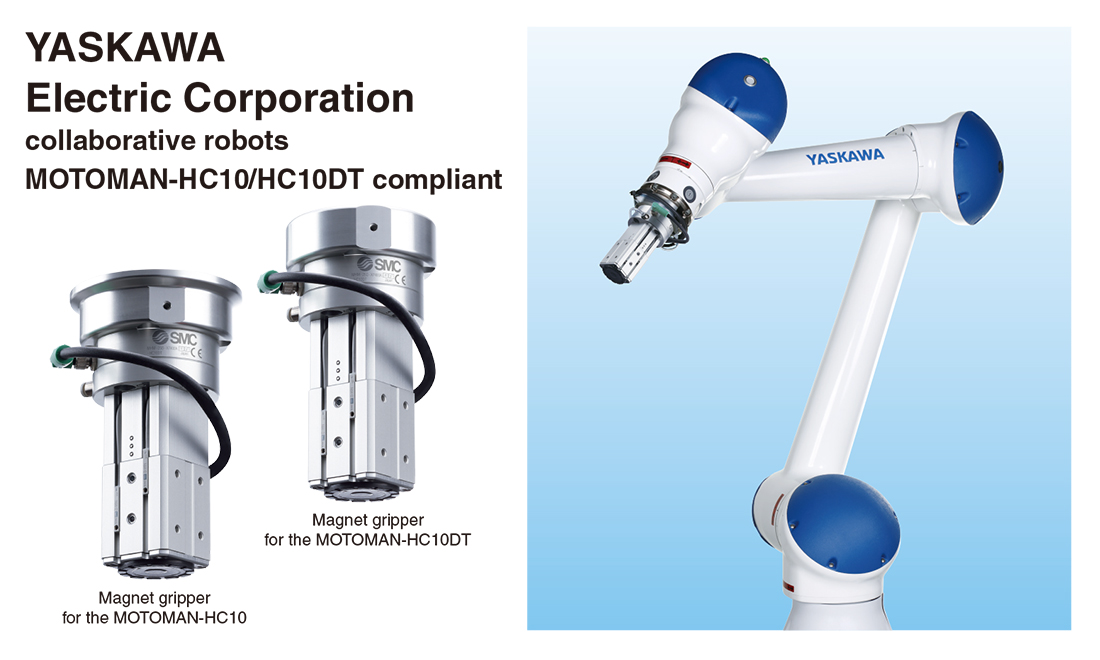
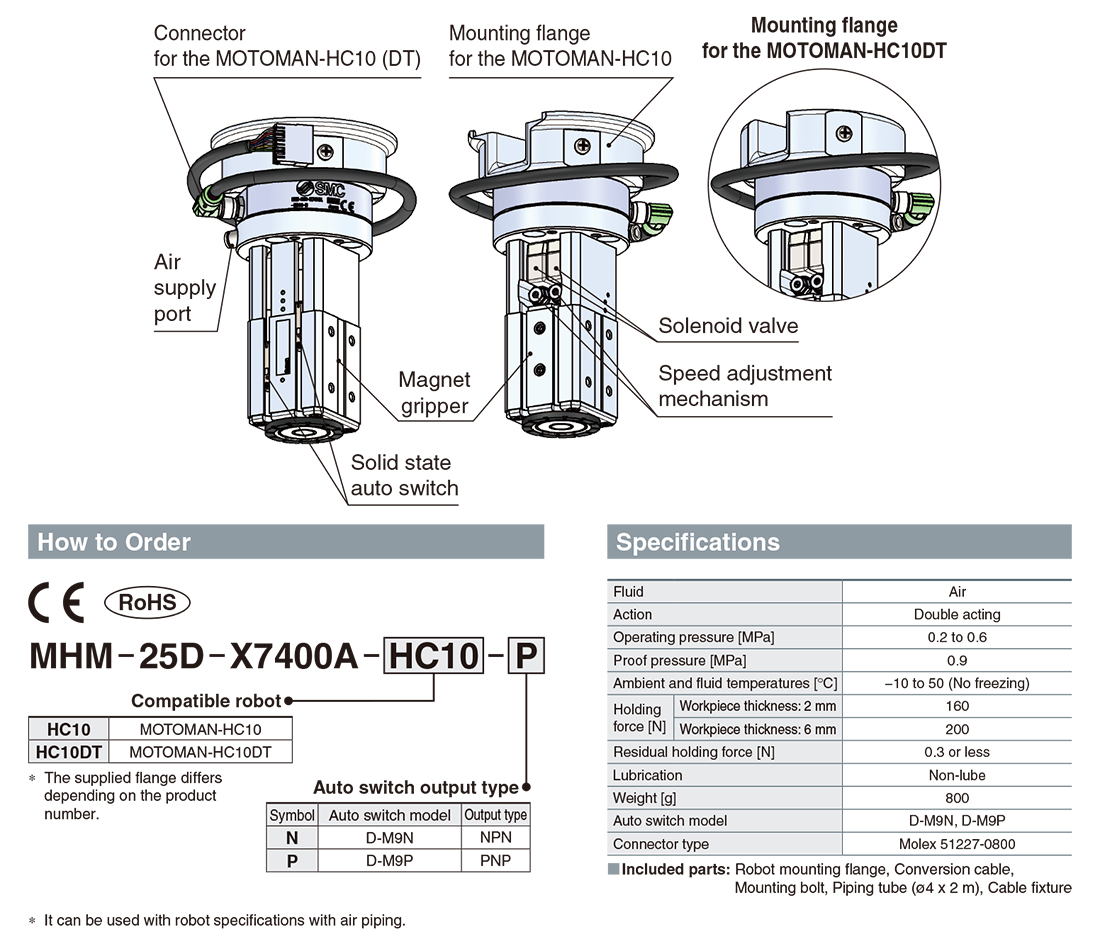
Magnet Gripper for Collaborative Robots MHM-X7400A-DTP/HC10DT/HC10
for the YASKAWA Electric Corporation MOTOMAN-HC

-
・Attracts and holds heavy objects with a magnet
・Supports workpieces with holes and uneven surfaces
・Compact with high holding force
Holding force: Max. 200 N (ø25, Workpiece thickness 6 mm)
・Continues to hold workpieces even when the air is shut off
・Operate by simply connecting 1 air supply tube and an electrical wiring connector.
・Integrated solenoid valve, auto switch, and piston speed adjustment mechanism
-
Magnet Gripper for Collaborative Robots MHM-X7400A-DTP/HC10DT/HC10
for the YASKAWA Electric Corporation MOTOMAN-HCManual
Series View search result MHM-X7400A-DTP
MHM-X7400A-HC10
MHM-X7400A-HC10DTView search result
| Series | Max. holding force N (Workpiece thickness mm) |
|---|---|
| MHM-X7400A-DTP MHM-X7400A-HC10 MHM-X7400A-HC10DT |
160(2) 200(6) |
Features
■Magnet Gripper for Collaborative Robots
■Attracts and holds heavy objects with a magnet
■Supports workpieces with holes and uneven surfaces
■Compact with high holding force: Max. 200 N (ø25, Workpiece thickness 6 mm)
■Continues to hold workpieces even when the air is shut off
■Operate by simply connecting 1 air supply tube and an electrical wiring connector.
■Integrated solenoid valve, auto switch, and piston speed adjustment mechanism
■Component Parts
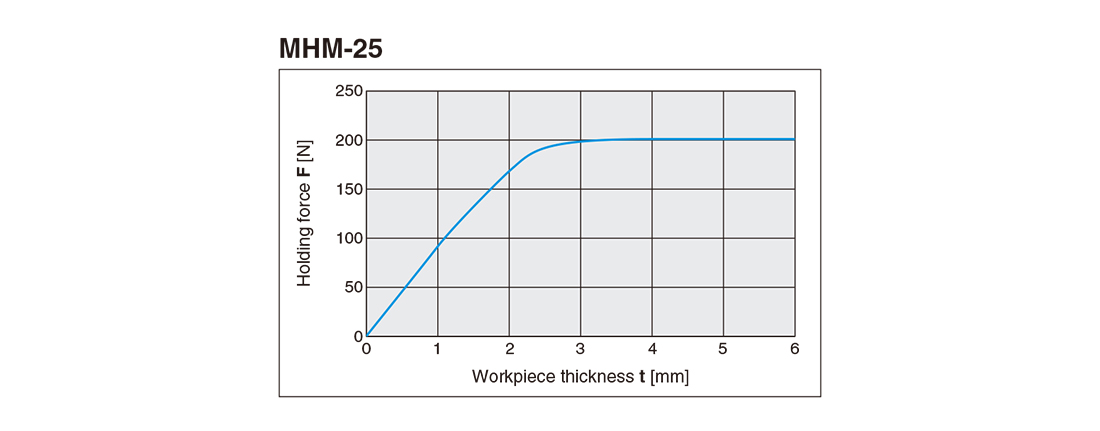
■Characteristics
Holding force
The holding force graph shows the theoretical value for low-carbon steel plates.
Holding forces vary depending on the material and shape of the workpiece. Please perform a holding test while referring to the value selected based on the graph.
■Dimensions